 Belépés
Belépés Felhasználó létrehozása
Felhasználó létrehozásamost szombaton akarsz lemenni?, sztem felejtõs, több mint 1000 bringás fog ténferegni a "balatonkörön" :-)Nem teker vki szombaton Bp-Balaton útvonalon? Én készülök lemenni, de szívesebben mennék többedmagammal...
Üdvözlünk a Bikemag Fórumon!
Fórumunk bejegyzéseit regisztráció nélkül is olvashatod, ha hozzá kívánsz szólni a fórumhoz, kérjük regisztrálj!Jelentkezz be Regisztrálj

Rekumbensek (alias fekvés, tekerés)

Indította
Bikemag
, 2001. június 02. 03:26
#181
: hozzászólás #181")
 Írta 2012. április 24. - 22:35
Írta 2012. április 24. - 22:35
simon23
-

- fórumtag
- 949 hozzászólás
törzsvendég
Ridley Noah Fast
 Ugrás az oldal tetejére
Ugrás az oldal tetejére
#182
Írta 2012. április 24. - 22:31
b zsolt
-

- fórumtag
- 43 hozzászólás
vendég
A súly befolyásolja a visszatérési sebességet. Ugyanazon a gépen egy száz kilós figura alatt gyorsabban tér vissza az alapállapotba, mint egy ötven kilós alatt, viszont a kisebb ridernek kevesebb energiára van szüksége a kormányzáshoz, míg a nehezebbnek többre, hiszen a saját súlyát emeli. (bár kb. csak 3-4 cm-re)
ha ezt magyarra lefordítom a nagyobb sújjal stabilabb is a gép.. akkor már értem miért is van neked ilyen bringád!!! (csak vicc)!! kaptam szabit, megyek(ünk) aradi túrára. ha lesz rá lehetõség kipróbálnám bringád!
#183
Írta 2012. április 24. - 22:25
motyoo
-

- fórumtag
- 689 hozzászólás
törzsvendég
Nem teker vki szombaton Bp-Balaton útvonalon? Én készülök lemenni, de szívesebben mennék többedmagammal...
#184
Írta 2012. április 24. - 20:35
Python
-

- fórumtag
- 2.412 hozzászólás
fórumfüggõ
Ezzel mi lett/van?
Ez még messze nem a végleges változat volt és megélt pár átalakítást. Késõbb szétrobbantottam.
A venti a Chilire került, a Sram DD a Green Spice-ba, a hátsó kerék Lompi valamelyik gépében szolgál, a hátsó villa az Elephantban, az ülés Levi gépén van stb. stb. stb.
#185
Írta 2012. április 24. - 20:29
Python
-
- fórumtag
- 2.412 hozzászólás
fórumfüggõ
A súly befolyásolja a visszatérési sebességet. Ugyanazon a gépen egy száz kilós figura alatt gyorsabban tér vissza az alapállapotba, mint egy ötven kilós alatt, viszont a kisebb ridernek kevesebb energiára van szüksége a kormányzáshoz, míg a nehezebbnek többre, hiszen a saját súlyát emeli. (bár kb. csak 3-4 cm-re)csak 1 kérdés: akkor ez igazából sújfüggõ???
#186
Írta 2012. április 24. - 19:55
lompi
-

- fórumtag
- 1.496 hozzászólás
törzsvendég

#187
Írta 2012. április 24. - 19:54
Sinbiciklis
-

- fórumtag
- 256 hozzászólás
törzsvendég
#188
Írta 2012. április 24. - 19:37
b zsolt
-
- fórumtag
- 43 hozzászólás
vendég
ez ebben a formában nem teljesen igaz. A kormány ebben az esetben maga a hajtómû...
... tulajdonképpen és leegyszerûsítveez volna az a bizonyos inga hatás. Alapvetõen a negatív utánfutású és egy nyomon haladó jármûvek instabilak. A Python esetében a testsúly hatására bekövetkezõ egyensúlyi állapotként áll egyenesbe a gép. Ebbõl kitéríteni testtel és lábbal kell. Ilyenkor a váz geometriából adódóan az ülés megemelkedik, tehát a saját súlyodat emeled és ez a súly az ami visszatéríti egyenesbe a gépet.
Másképpen:
Vegyél egy ruhaszárító kötelet. Helyezz rá súlyt. Amennyiben kibillented az egyensúlyi állapotából (mint egy hintát) a súly bizonyos idõ elteltével vissza áll nyugalmi állapotába. A kötél két vége a kerekek tengelyei, a kötél maga a váz, a súly pedig Te magad vagy.
csak 1 kérdés: akkor ez igazából sújfüggõ???
#189
Írta 2012. április 24. - 15:33
Python
-
- fórumtag
- 2.412 hozzászólás
fórumfüggõ
Aki ért hozzá, csinálja! Aki nem, az beszél róla...  Mi csak itten beszélgetünk.
Mi csak itten beszélgetünk.
Mi csak itten beszélgetünk.
#190
Írta 2012. április 24. - 15:29
lompi
-
- fórumtag
- 1.496 hozzászólás
törzsvendég
#191
Írta 2012. április 24. - 15:16
Python
-
- fórumtag
- 2.412 hozzászólás
fórumfüggõ
Mintha azt sugalnád, hogy ehhez nekem bármi közöm is lett volna!Vagy ha sikerül Tibimert is úgy ráugrasztani a hátsókerekes témára, mint Lompit a lengõorrúra.
#192
Írta 2012. április 24. - 15:13
Reku Papa
-

- fórumtag
- 1.423 hozzászólás
törzsvendég
Van még pár megválaszolatlan kérdésem, de az biztos, hogy csak akkor jutnánk megegyezésre, ha egységes lenne némelyik meghatározás.
Vagy ha sikerül Tibimert is úgy ráugrasztani a hátsókerekes témára, mint Lompit a lengõorrúra. Lám, Lompi gépeinek fotói már ott díszelegnek jónéhány amerikai rekus mûhelyének falán. Ha Tibimer se sajnálja a flexkorongot, lehet hogy õ is hamarosan elõáll egy vezethetõ jószággal.
#193
Írta 2012. április 24. - 12:41
Python
-
- fórumtag
- 2.412 hozzászólás
fórumfüggõ
Ebben tévedsz! Az inga hatás akkor mûködik, ha a súlypont a függesztési pontok alatt van. (Utalhatnék itt akár az alsó és felsõszárnyas repülõkre, de ez messzire vezetne)"A kötél két vége a kerekek tengelyei," - helyett a kerekek talaj érintési pontjai.
Tehát a példámban a kötél rögzítési pontjai a keréktengelyek!
(a talaj érintési pontjai azok a pontok, ahová a botokat szúrták, amire a kötelet kötötték
)"összekuszálódnak a dolgok.
Ezzel maradéktalanul egyet értek!
A probléma alapvetõen a definíciókkal van. Az, amit leírtál természetesen és adott példában igaz is lehet. A központi kormányzást másképpen használja a Wikipedia, ettõl eltérõen Jurgen Mages stb…
További kérdés, hogy honnantól központi kormányzás és honnantól nem? A példád is jó! Amennyiben a keréktengelyektõl azonos távolságra van a homlokcsõ és a homlokcsõre van rögzítve az ülés milyen kormányzásról beszélünk?
Attól függ majd hova lesz rögzítve a kormány?
A jelenlegi gép esetében mindkét kerék mozdul. A két kerék stabilan a talajon, tehát csak a váz „törhet” és a kerék billenhet.
A kerékhez képest mozdítom el magam vagy a kereket mozdítom el magamhoz képest?
Ebben az esetben mindkettõ mozdul, de eltérõ mértékben. Akkor ez esetben ez a mérték határozza meg azt, hogy elsõ vagy hátsókerék kormányzású a gép?
Talán azt is figyelembe kell venni, hogy merre halad…
Van még pár megválaszolatlan kérdésem, de az biztos, hogy csak akkor jutnánk megegyezésre, ha egységes lenne némelyik meghatározás.
#194
Írta 2012. április 24. - 12:27
Tibor-s-trike
-
- fórumtag
- 354 hozzászólás
törzsvendég
Másképpen:
Vegyél egy ruhaszárító kötelet. Helyezz rá súlyt. Amennyiben kibillented az egyensúlyi állapotából (mint egy hintát) a súly bizonyos idõ elteltével vissza áll nyugalmi állapotába. A kötél két vége a kerekek tengelyei, a kötél maga a váz, a súly pedig Te magad vagy.
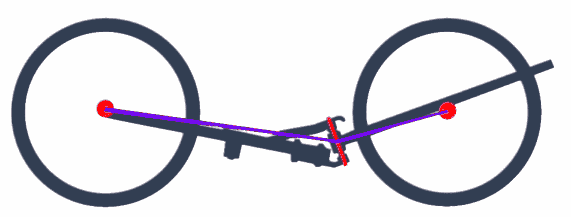
A piros vonalról szóló megjegyzésemben is arra szerettem volna felhívni a figyelmeteket, hogy szvsz rosszul modelleztek.
"A kötél két vége a kerekek tengelyei," - helyett a kerekek talaj érintési pontjai.
A kanyarodáskor a geometriai viszonyok megváltoznak, az egyész dolog térbelivé, igen összetetté válik, síkban, egyetlen vetületben tovább nem is modellezhetõ eredményesen.
Egy trike némi fémbõl, kompozit anyagból, gumiból, mûanyagból és rengeteg kompromisszumból áll
#195
Írta 2012. április 24. - 12:04
Python
-
- fórumtag
- 2.412 hozzászólás
fórumfüggõ
"Az utánfutás értékének nincs köze a hátsó kerékhez! "
Az utánfutás elsõ sorban mindig egy adott kerékre és annak saját villájára vonatkozik. Abban az esetben, amikor a két kerék hasonló távolságra van a villatengelytõl, akkor összekuszálódnak a dolgok. (Python) Ha a kerekek a villatengelytõl nagyságrendileg eltérõ távolságra vannak, akkor egyértelmû hogy melyikre vonatkozik az utánfutás: A közelebbire. Így egy hátsó kerék kormányzású jármû is lehet pozitív utánfutású. (Lásd villás targoncák, bevásárló kocsik.)
Ezért használom a központi kormányzás kifejezést! A targonca valóban hátsó kerék kormányzású, de ebben az esetben inkább egy Rába Steigerrõl van szó, ahol nem a kerekek kormányzottak, hanem a váz "törik".

... és ahogyan az több elérhetõ videón is látszik, ezeken a gépeken (Python vagy Dennis Renner és Tibimer gépe) a két kerék együtt billen rá az ívre. Nem lehetséges csak az egyik kereket mozgatni.
A targonca gyakorlatilag ugyan az az eset, mint ha egy bármely autóval tolatnál.
A Rába Steiger példa ilyen szempontból is jó, hiszen ott még a tolatás is ugyan azon az íven történik, mintha elõre menne...
#196
Írta 2012. április 24. - 11:58
Python
-
- fórumtag
- 2.412 hozzászólás
fórumfüggõ
ez ebben a formában nem teljesen igaz. A kormány ebben az esetben maga a hajtómû...A videon található rekumbens kormány nélkül irányítható
... tulajdonképpen és leegyszerûsítveKettõs inga hatás?
-A testsúlyod hatására állnak egyenesbe a kerekek. Ennél tudományosabb választ Python tud adni.
A videot pedig érdemes végignézni.
ez volna az a bizonyos inga hatás. Alapvetõen a negatív utánfutású és egy nyomon haladó jármûvek instabilak. A Python esetében a testsúly hatására bekövetkezõ egyensúlyi állapotként áll egyenesbe a gép. Ebbõl kitéríteni testtel és lábbal kell. Ilyenkor a váz geometriából adódóan az ülés megemelkedik, tehát a saját súlyodat emeled és ez a súly az ami visszatéríti egyenesbe a gépet.Másképpen:
Vegyél egy ruhaszárító kötelet. Helyezz rá súlyt. Amennyiben kibillented az egyensúlyi állapotából (mint egy hintát) a súly bizonyos idõ elteltével vissza áll nyugalmi állapotába. A kötél két vége a kerekek tengelyei, a kötél maga a váz, a súly pedig Te magad vagy.
#197
Írta 2012. április 24. - 11:54
Reku Papa
-
- fórumtag
- 1.423 hozzászólás
törzsvendég
"Az utánfutás értékének nincs köze a hátsó kerékhez! "
Az utánfutás elsõ sorban mindig egy adott kerékre és annak saját villájára vonatkozik. Abban az esetben, amikor a két kerék hasonló távolságra van a villatengelytõl, akkor összekuszálódnak a dolgok. (Python) Ha a kerekek a villatengelytõl nagyságrendileg eltérõ távolságra vannak, akkor egyértelmû hogy melyikre vonatkozik az utánfutás: A közelebbire. Így egy hátsó kerék kormányzású jármû is lehet pozitív utánfutású. (Lásd villás targoncák, bevásárló kocsik.)
Az utánfutás elsõ sorban mindig egy adott kerékre és annak saját villájára vonatkozik. Abban az esetben, amikor a két kerék hasonló távolságra van a villatengelytõl, akkor összekuszálódnak a dolgok. (Python) Ha a kerekek a villatengelytõl nagyságrendileg eltérõ távolságra vannak, akkor egyértelmû hogy melyikre vonatkozik az utánfutás: A közelebbire. Így egy hátsó kerék kormányzású jármû is lehet pozitív utánfutású. (Lásd villás targoncák, bevásárló kocsik.)
#198
Írta 2012. április 24. - 11:29
Python
-
- fórumtag
- 2.412 hozzászólás
fórumfüggõ
Nekem volt egy hosszú tengelytávú változatom, bár elsõ kerék kormányzással. (Jobban szeretem ebben az esetben is a központi kormányzás kifejezést.)

Emlékezetem szerint relatív jó volt az egyenesfutása és nem nagyon akart fordulni.
tény:
- negatív utánfutás esetében a sebesség növekedése és a stabilitását csökkenti
- pozitív utánfutás esetén sebesség növekedése a stabilitást növeli
Amennyiben megnézitek az ábrákat és a képeket, a Pythonnál 60'-65'(esetemben 63'), Tibimer és Dennis Renner gépénél meg 71' homlokcsõszög.

Érdekes felvetés Papa részérõl, hogy stabilabb lenne a gép a hátsó tengely és a homlokcsõ távolságának növelésével. Sajnos erre nincs válaszom, de biztos nagyobb erõt igényelne a kormányzás. (erõkar-teherkar)
Mivel a menetirány azonos, de a hátsókerék kormányzásúnál a a homlokcsõ és az elsõkerék közötti távolság nagyobb, vélhetõen ezt ezzel a nagyobb homlokcsõszöggel tudta kompenzálni Renner. (természetesen csak tippelek) További kérdés számomra az is hogy miért nem helyezte alacsonyabbra az ülést ezzel erõsítve a visszatérítõ erõt?
ingahatás
A válasz valószínûleg a nagyobb negatív utánfutásban keresendõ, hiszen ahogyan az ülés lejjebb kerül, ez az érték nõ.
Az utánfutás értékének nincs köze a hátsó kerékhez!
Az utánfutás (trail) geometriai értelmezése.
Azt azért le kell szögeznem, hogy (és itt a rajzodra célzok) hogy az elsõkerék a menetirány szerint értendõ, tehát a homlokcsõszög ennek megfelelõ.
Az "a" és "b" ábrát alapból elvetném, mert a tengely vonal fölé kerül a súlypont, így az ingahatás nem érvényesülhet hatékonyan. A "b" ábrán pedig a jelölés ellenére a homlokcsõszög 109'. Amennyiben hátra felé menne, lehetne 71'...
A "d" ábra ugyanezen okból felejtõs... Akkor nézzük a megmaradt "c" ábrát. Ez a legszimpatikusabb! Szerintem ezt a vonalat kellene követni úgy, hogy erõsödjön a központosító hatás, tehát a súlypontot mélyen a tengelyek alá vinni és megtalálni az optimális arányt az elsõkerék tengely - homlokcsõ - hátsókerék tengely távolságokban. E mellett számít az ülõlap és háttámla dõlés-hajtómû, tehát a kialakuló súlypont helyzete, aránya is. Az ideális helyzet az, amikor a legnagyobb terhelést sikerül a homlokcsõre központosítani. (talán még emlékeztek a videómra, a menetirányba visszatérõ elsõ kerékkel...)
Az homlokcsõ - elsõ kerék tengely távolságát csökkentve (ez valószínûleg már csak kisebb kerékmérettel érhetõ el) az utánfutást is csökkenteni.
A függõleges homlokcsõszög ötletét azért nem támogatom, mert ebben az esetben a visszatérítõ erõ minimális vagy akár nulla is lehet. Ennek számításához itt egy ingyenes program.
Mind ezt a Pythonnal szerzett tapasztalataimra alapozom, ami tulajdonképpen nem ugyan az, még ha az eltérés elsõ ránézésre csak a homlokcsõ üléshez viszonyított helyzetében van is.
Javaslom, hogy vedd fel a kapcsolatot a Pythonautákkal, talán lesz ott néhány jó ötlet. Negatív utánfutásban ott a legtöbb tapasztalat.
...és még valami! Egy negatív utánfutású gép - relatíve - mindig is instabil lesz!
További sikeres kísérletezést!
Emlékezetem szerint relatív jó volt az egyenesfutása és nem nagyon akart fordulni.
tény:
- negatív utánfutás esetében a sebesség növekedése és a stabilitását csökkenti
- pozitív utánfutás esetén sebesség növekedése a stabilitást növeli
Amennyiben megnézitek az ábrákat és a képeket, a Pythonnál 60'-65'(esetemben 63'), Tibimer és Dennis Renner gépénél meg 71' homlokcsõszög.
Érdekes felvetés Papa részérõl, hogy stabilabb lenne a gép a hátsó tengely és a homlokcsõ távolságának növelésével. Sajnos erre nincs válaszom, de biztos nagyobb erõt igényelne a kormányzás. (erõkar-teherkar)
Mivel a menetirány azonos, de a hátsókerék kormányzásúnál a a homlokcsõ és az elsõkerék közötti távolság nagyobb, vélhetõen ezt ezzel a nagyobb homlokcsõszöggel tudta kompenzálni Renner. (természetesen csak tippelek) További kérdés számomra az is hogy miért nem helyezte alacsonyabbra az ülést ezzel erõsítve a visszatérítõ erõt?
ingahatás
A válasz valószínûleg a nagyobb negatív utánfutásban keresendõ, hiszen ahogyan az ülés lejjebb kerül, ez az érték nõ.
Az utánfutás értékének nincs köze a hátsó kerékhez!
Az utánfutás (trail) geometriai értelmezése.
Azt azért le kell szögeznem, hogy (és itt a rajzodra célzok) hogy az elsõkerék a menetirány szerint értendõ, tehát a homlokcsõszög ennek megfelelõ.
Az "a" és "b" ábrát alapból elvetném, mert a tengely vonal fölé kerül a súlypont, így az ingahatás nem érvényesülhet hatékonyan. A "b" ábrán pedig a jelölés ellenére a homlokcsõszög 109'. Amennyiben hátra felé menne, lehetne 71'...
A "d" ábra ugyanezen okból felejtõs... Akkor nézzük a megmaradt "c" ábrát. Ez a legszimpatikusabb! Szerintem ezt a vonalat kellene követni úgy, hogy erõsödjön a központosító hatás, tehát a súlypontot mélyen a tengelyek alá vinni és megtalálni az optimális arányt az elsõkerék tengely - homlokcsõ - hátsókerék tengely távolságokban. E mellett számít az ülõlap és háttámla dõlés-hajtómû, tehát a kialakuló súlypont helyzete, aránya is. Az ideális helyzet az, amikor a legnagyobb terhelést sikerül a homlokcsõre központosítani. (talán még emlékeztek a videómra, a menetirányba visszatérõ elsõ kerékkel...)
Az homlokcsõ - elsõ kerék tengely távolságát csökkentve (ez valószínûleg már csak kisebb kerékmérettel érhetõ el) az utánfutást is csökkenteni.
A függõleges homlokcsõszög ötletét azért nem támogatom, mert ebben az esetben a visszatérítõ erõ minimális vagy akár nulla is lehet. Ennek számításához itt egy ingyenes program.
Mind ezt a Pythonnal szerzett tapasztalataimra alapozom, ami tulajdonképpen nem ugyan az, még ha az eltérés elsõ ránézésre csak a homlokcsõ üléshez viszonyított helyzetében van is.
Javaslom, hogy vedd fel a kapcsolatot a Pythonautákkal, talán lesz ott néhány jó ötlet. Negatív utánfutásban ott a legtöbb tapasztalat.
...és még valami! Egy negatív utánfutású gép - relatíve - mindig is instabil lesz!
További sikeres kísérletezést!
#199
Írta 2012. április 24. - 09:38
gery169
-

- fórumtag
- 21 hozzászólás
vendég
A videoból nem sokat láttam, nagyon szaggat a gépemen. Mi az a kettõs inga hatás?
A videon található rekumbens kormány nélkül irányítható, ez elég stabilnak tûnik.
Kettõs inga hatás?
-A testsúlyod hatására állnak egyenesbe a kerekek. Ennél tudományosabb választ Python tud adni.
A videot pedig érdemes végignézni.
#200
Írta 2012. április 24. - 06:52
Reku Papa
-
- fórumtag
- 1.423 hozzászólás
törzsvendég
és azt sem akartam, hogy nagyon aránytalan legyen.
Ja, hogy te tudod, mennyi az optimális arány?? Hát akkor olyanra csináld!
A tréfát félre téve: Te új utakon jársz. Eddig senki nem alkotott jól vezethetõ hátsó kerék kormányzású rekut. Ne akard másolni azokat, akiknek nem sikerült! Kísérletezz, akár extrém arányokkal is!
Az én lelki szemeim elõtt egy nagy tengelytávolságú reku képe lebeg, amelynek a villaszára közel van a függõlegeshez, utánfutása hatalmas, és a villa messze a vezetõ háta mögött van, nem alatta.







